 点评此图
点评此图
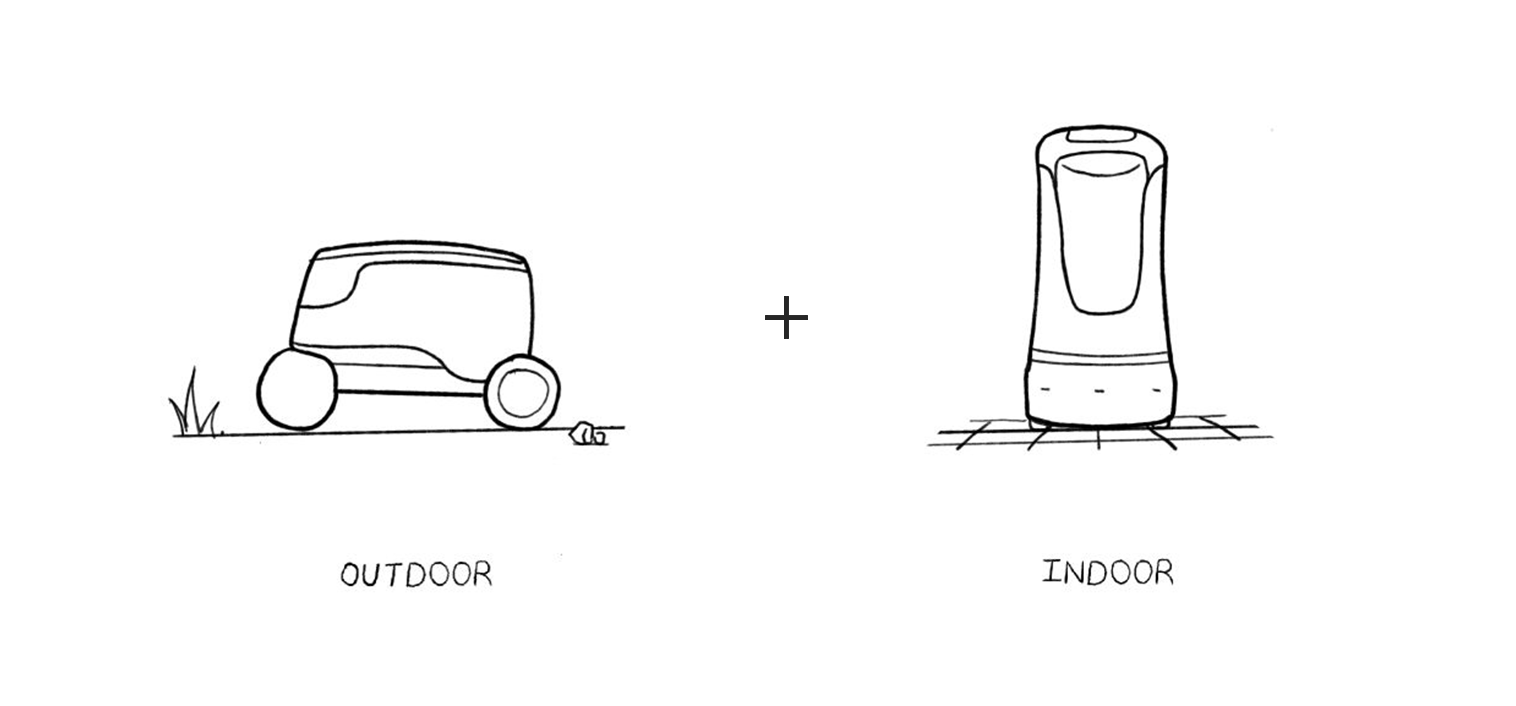
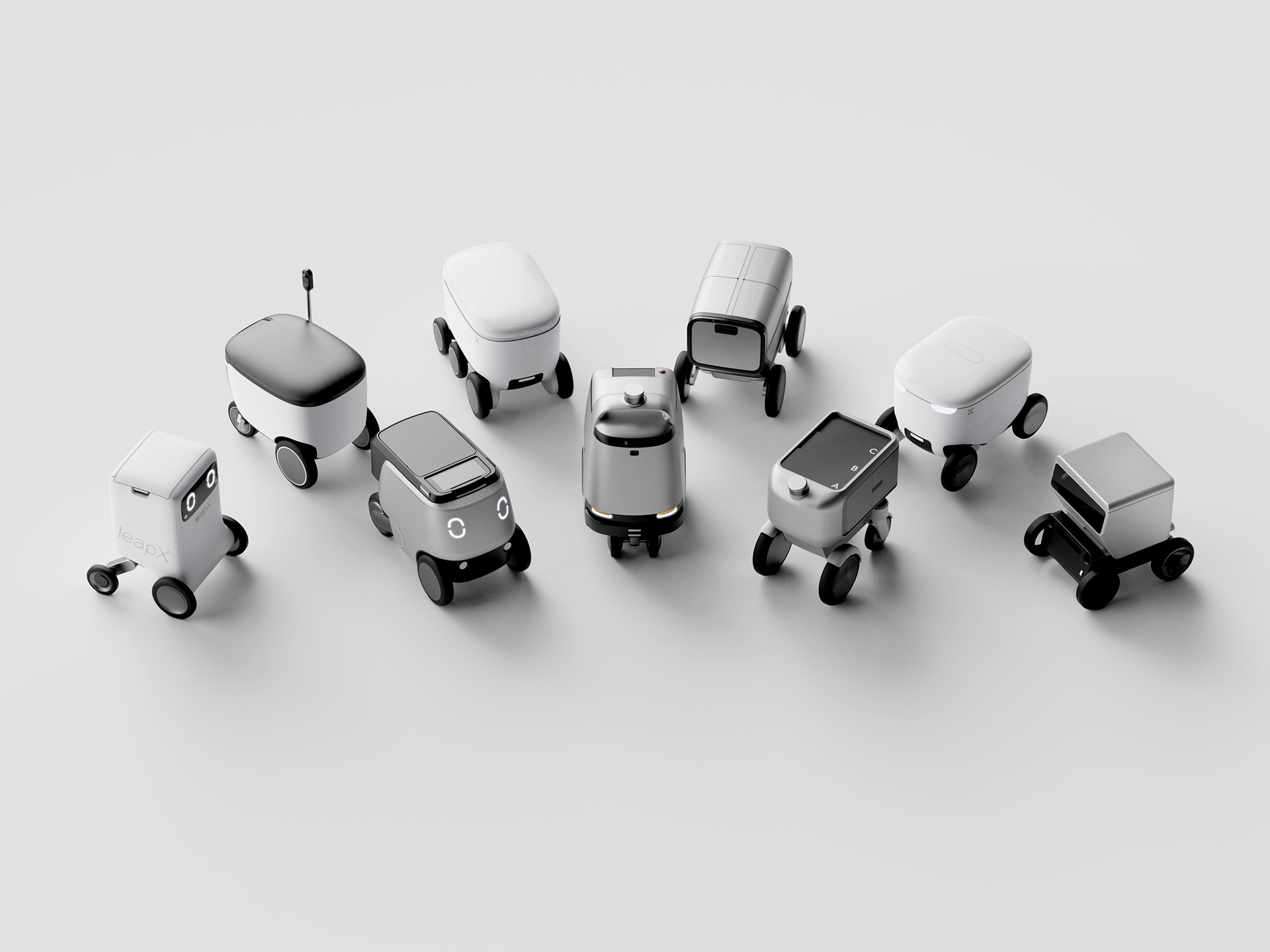
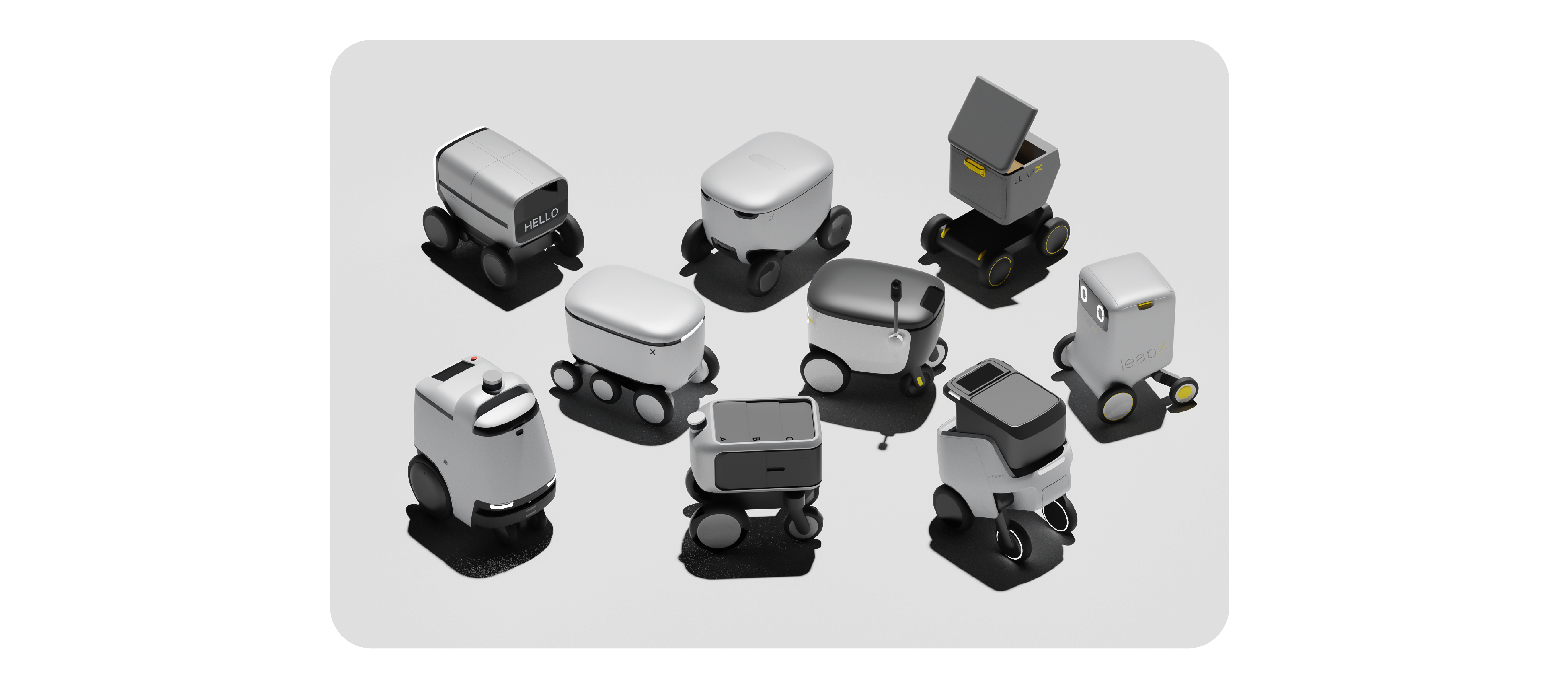
在2019年初,LEAPX刚成立不久,我们接到了一个前瞻性项目,想要重新构思无人配送的可能性:目前无人配送机器人/配送车分为室内和室外两种,各司其职,而我们的客户行深智能,目标高远,希望能设计出一款无人配送机器人,打通室内外的场景,让配送机器人能够将货物和外卖直接从商户送到用户的家门口。
 点评此图
点评此图
 点评此图
点评此图
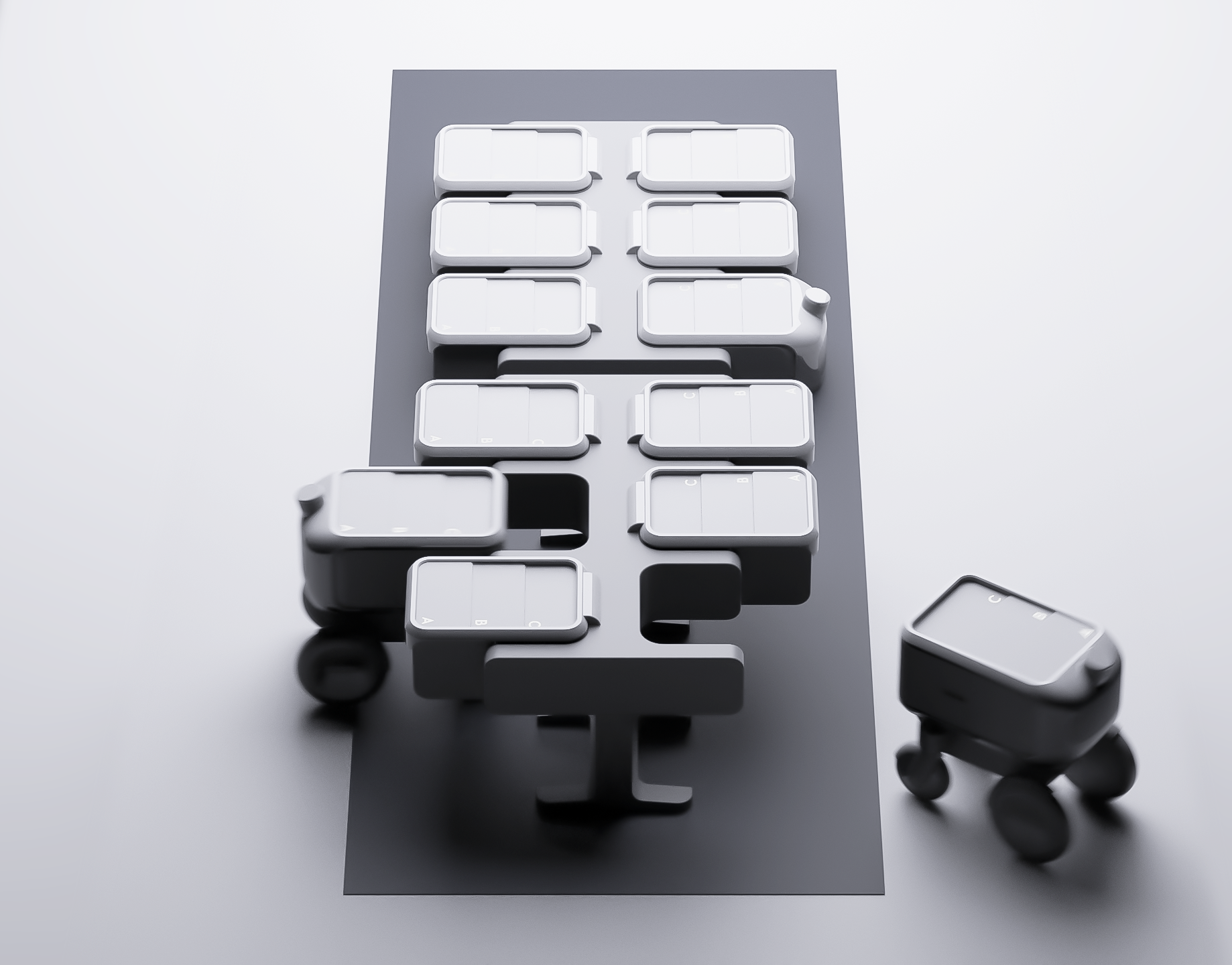
室外的无人配送车,为了能高速稳定地在室外复杂路况行驶,一般重心低,轴距比较长,轮子直径也比较大。这也导致了车的占地面积大,转弯半径大,不灵活,对于进入室内行驶是个很大的障碍。而室内的无人配送机器人,为了方便在拥挤的室内、电梯灵活通行,一般做的占地面积很小,高度高,方便用户拿取货品。而这种高重心,小轮距的架构又让这种机器人在室外路况寸步难行。怎样平衡这两个互相冲突的需求,就成了项目的关键。
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
 查看点评
查看点评
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
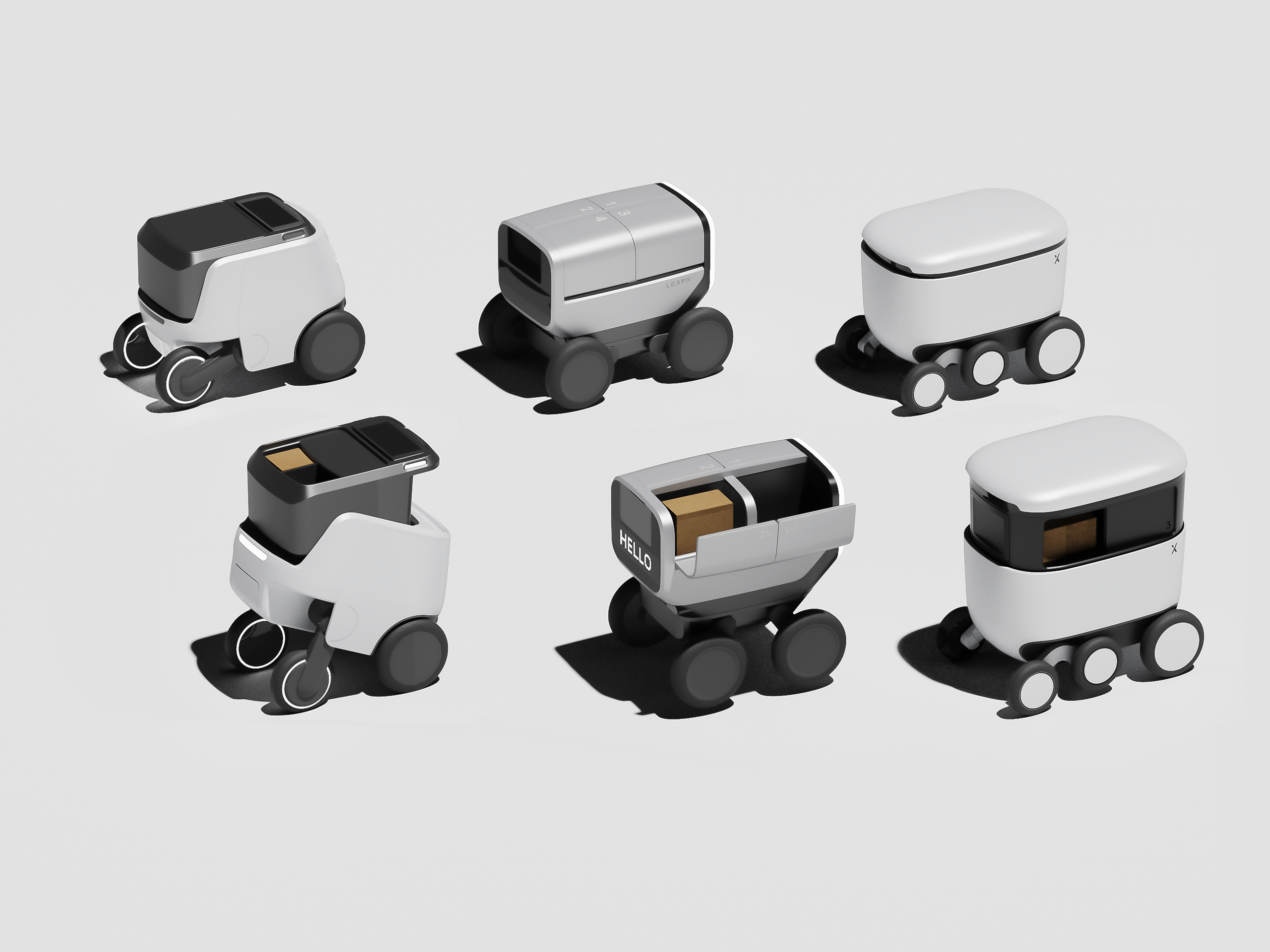
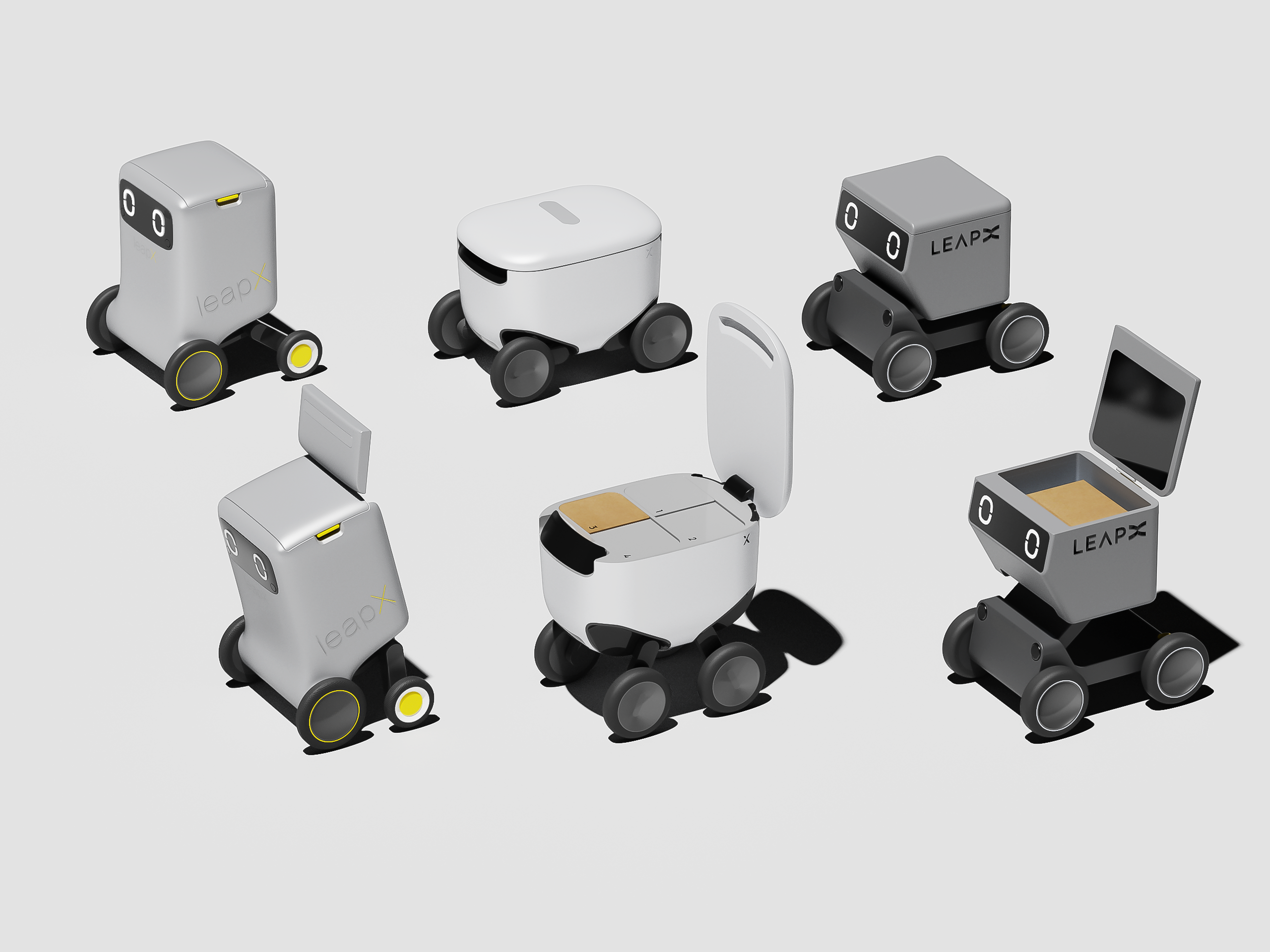
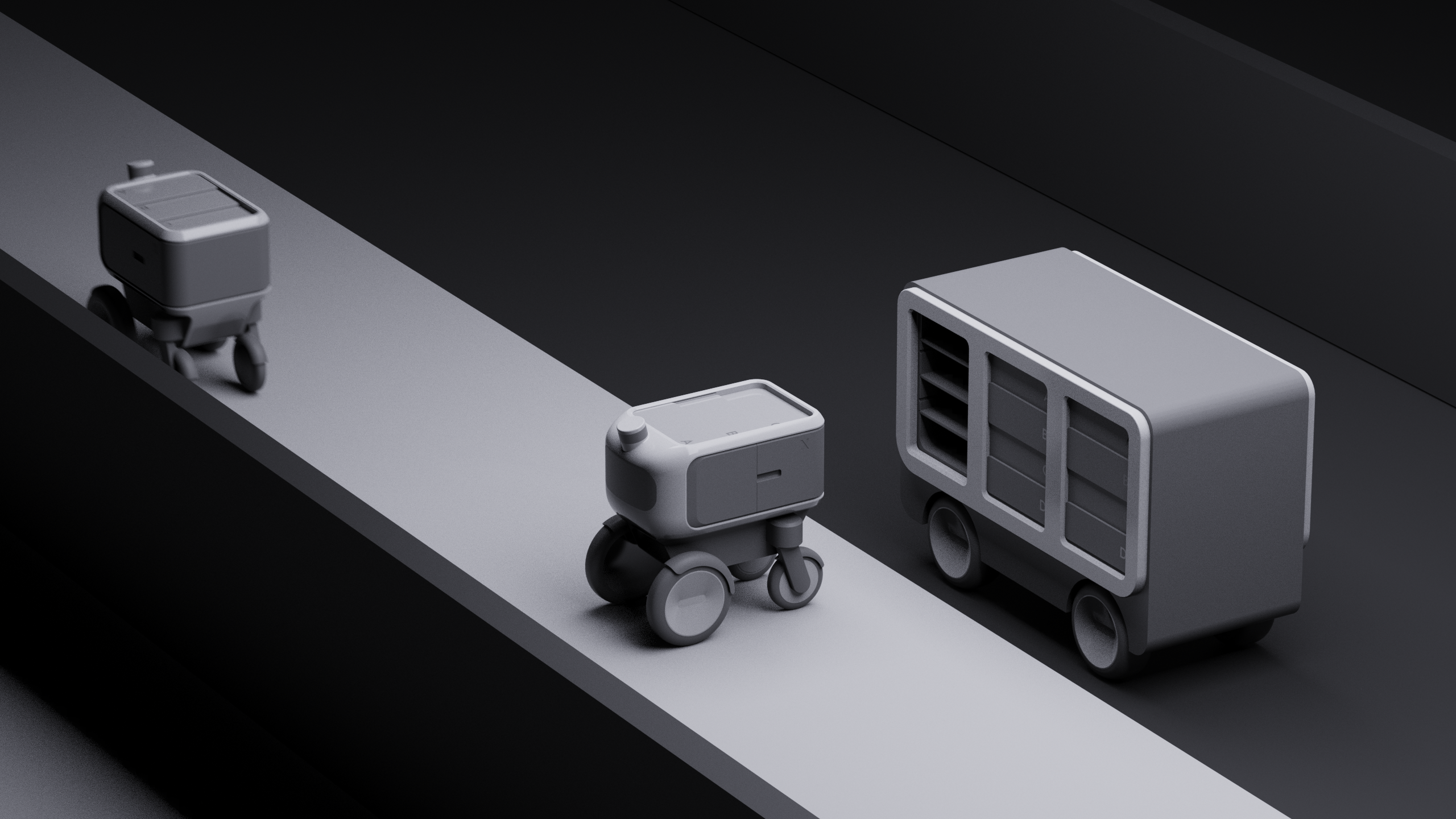
我们也设想了未来不同大小的配送机器人之间互相配合的场景,让大的无人快递车进行较远距离的运输,到了社区后再传递给小配送机器人(或者通过快递驿站来传递给小配送机器人),完成最后一公里到达用户门前的运输,整个过程都可以自动话完成,无需人工干预。
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
 点评此图
点评此图
欢迎大家转至下方链接了解产品背后的设计过程
https://www.puxiang.com/articles/28a381b9af9409ab402a0b16852a7f85
 点评此图
点评此图
 查看点评
查看点评
 点评此图
点评此图
Design Team|Siyoon Kim, Yumian Deng, Yufeng Shang
Visualization|Barney Mason, Kaihuang Chen, Yushen Wang, Yaokun Wu
Client|Xingshen Technology
LEAPX DESIGN
-
www.leapx.design
contact@leapx.design
-
 点评此图
点评此图
小小心意,大大鼓励
本作品版权归 LEAPX Design 所有,禁止匿名转载及个人使用,任何商业用途均需联系原作者。
举报





33位TOP榜设计师点赞推荐

126赞 29评论 5504人气

426赞 48评论 29574人气

277赞 29评论 27387人气

523赞 59评论 32439人气




 关注
点赞
收藏
关闭弹幕
留言
关注
点赞
收藏
关闭弹幕
留言
确认要删除该条评论吗?
小小心意,大大鼓励
最高赞赏200元
使用支付宝扫描二维码完成支付
使用微信扫描二维码完成支付
当前余额:¥0.00
支付操作会向你普象账户的注册手机号发送验证码
请注意查收

扫一扫添加
普象商务
扫一扫添加
客服微信

扫一扫下载
手机APP

请关注公众号iamdesign或扫码关注
 沪公网安备 31011502009179号
沪ICP备13011487号-2 上海普象文化传播有限公司
沪公网安备 31011502009179号
沪ICP备13011487号-2 上海普象文化传播有限公司




之前看到的机器人真实使用场景:一群小孩围着一个餐厅送餐机器人转,其中一个小孩试图拉扯改变它的前进方向,还有一个反复用力冲撞那个机器人,全程3分钟到我离开都没人管
可能选择了双驱动+双万向轮+上取货方式+车柜分离可能落地及后续应用会更广。如果是您,您会选择那个方案进行实施呢?
未来肯定能实现,现在条件还不是特别成熟
好像转不了弯
有一个错别字,自动化写成了自动话
不得不说LEAPX DESIGN是非常专业的设计团队,作品从造型、机械结构创新、表现力上来说可以说是满分,但对场景和技术产品化上考虑还是有致命的问题。比如最终方案用的是后轮轮毂电机,前轮小万向轮的底盘方案,优点是成本低,灵活性高。这种结构比较适合短途园区内运输,不适合公开道路,遇到高一点减速带或浅坑很容易卡住,严重的话还可能翻车。如果产品定位是短途运输,选用的却是比较贵的16线以上的机械激光雷达作为感知方案,成本又太高,标准化低,目前视觉和固态雷达会更适合短途封闭道路,所以成本、功能和场景定义之间是矛盾的。当然这可能不是设计团队的问题,是客户的产品决策问题,但可以通过更深的对技术、场景、用户做研究是可以挽回的,否则对整个设计就是致命的错误。
请问,是用什么软件渲染的,期待可以学习一下
帅哭了。但是实现还有点远啊,,我觉得目前的群众一定会对机器人动手动脚哈哈哈,概念挺好的
好厉害,我们学校有实现了小蛮驴自由,很棒的设计!
我之前也做了相同的项目,落地发现确实有很多问题。例如差速转向方式,对地面会有一定破坏性,如果在某些场景例如铺地毯的酒店室内等。还有轮毂电机有过热等等问题,后面就不了了之了,可惜了。但是你们做的好棒!
草图并不精致,但是模型特别炫酷
屠杀新手村
乐迪
满大街骑手哭晕在路上 带菜刀找你们拼命!
小鹏P3